VEnus Stabilized Plafeform for Environmental Research
Multi-objective atmospheric platform carrier
In a horizon of one or two decades and with a large budget, one could imagine a large multi-objective robotic atmospheric platform. A manoeuvrable balloon large enough to carry a wide variety of scientific experiments would answer many of the questions we have about Venus. If we add an ability to explore other layers of the atmosphere or even the surface, we could have a much better knowledge of the planet.
The aim of this project is to make a mission capable of studying most aspects of Venus. The mission is centered around one or more flying platforms in the cloud layer and studies its immediate environment. It must also carry drones capable of depositing payloads on the surface or bring samples back for study in the main platform.
Below are the main points to study to develop this atmospheric platform:
Main Platform (VESPER): The way in which balloons are deployed in the atmosphere and its ability to manoeuvre in the atmosphere needs to be studied. Given the complexity of the mission, it is possible to use more advanced technologies than for ALIVE. It must also be able to provide its payloads with a fairly large electrical power even at night.

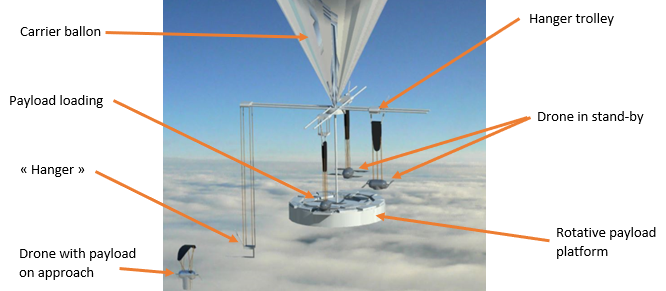
Drone: Drones must be able to move at altitude, land and stay on the surface for a little while before going back to the main platform. We also need to find a way to get him to dock in flight with VESPER, cool it down and leave with a new payload.
Payload : The goal is to imagine payloads with the interface with the drone and the loading system standardized so that it can change payload. Some payloads must remain on the drone from the beginning to the end of the flight, others are dropped off and then recovered from the surface. For now we can imagine:
– Atmospheric study module: It would take the place of atmospheric probes but being reusable. It is intended to explore areas of the atmosphere in which VESPER cannot go like the lower mist layer. With a more enduring drone, it can even explore higher latitudes or even in polar cyclones.
-Surface scanning module: It would fly over the planet by placing itself under the lower mist layer, allowing the surface to be studied under frequencies not usable by orbiters because of the cloud layer.
-Surface study module: It must include all the instrumentation of a conventional Venera-type lander but would only spend a few tens of minutes or hours on the surface before being reassembled to the main platform to cool down. So it could explore a lot of points of the planet where a conventional lander would make one. It is also possible to have a module capable of surviving several days, it could be dropped by a drone that would immediately go up on VESPER and then return to retrieve the module one or more atmospheric rotations (4 to 5 days) later to reassemble it to the main balloon. This possibility remains valid for a rover like ROMEO.
-Drilling module: Mainly mechanical, this module collected rock samples that would be analyzed by advanced instruments that would not withstand surface conditions and are therefore on board VESPER. For surface samples, they can be retrieved in minutes during a pick and go drone flight. For deeper samples, it is possible to install on the surface a drill that operates on the force of wind and that a drone would regularly join to recover the newly extracted cores.
-Seismic module: A seismographic study must be able to continue for several months, which is impossible for a conventional lander. It is possible to adapt the MOSES module so that it is recovered by a drone and its band is changed to VESPER. If the mechanical system is not precise enough, it is possible to use dropped drones and recover two electronic seismographs that took turns on the surface and cooled down in the main platform. A final solution would be to incorporate a thermal absorption material into the seismograph that could be regularly replaced by fresh material using a drone.