Romé0 is the nickname for the first test model of the ROMEO project.
Objectives
As a reminder, the goal of ROMEO is to make a mobile device completely closed, without any holes or bearings affecting the integrity of the hull. Therefore, the classic use of wheel is impossible, it is the whole machine that must move from a single block.
The purpose of this first model was to verify feasibility. Since it was anticipated in advance that there would be countless iterations, the material had to be minimalist and the adaptations as minimally invasive as possible so that the components could be used for the next iteration. The goal was to have a machine capable of moving forward, backward and spinning, even in an imprecise way.
Compared to the initial design of the ROMEO project, which consisted of two spherical elements attached, Rome0 had to be composed from the beginning of an element in order to limit the necessary components. In addition, due to difficulties in obtaining a spherical hull of good size, the tests had to be carried out with a cylindrical hull. This difference is possible because the test model will not be subjected to a pressure differential and a need to minimize the thermal exchange surface like a Venusian rover. This choice also involves an additional difficulty in rotating the craft because the friction surface is linear and not punctual.
Elements
The main elements were identified from the beginning.
A cylindrical hull that serves as a wheel and surrounds the rover. The first tests were carried out with a plastic cylinder (a bottle of soda). It collapsed under the weight of the rover creating a sustening polygon incompatible with movement. No tests with this first hull were filmed. The adoption of a stiffer metal shell (a canning couscous box) has resulted in satisfactory results for Romé0.1 and 0.2 (see chronology below). But its diameter of 10cm, being too small, caused problems (described below at the Rome0.3 stage) and had to be replaced by a 15cm box (a can of duck leg confit) for Rome0.4.
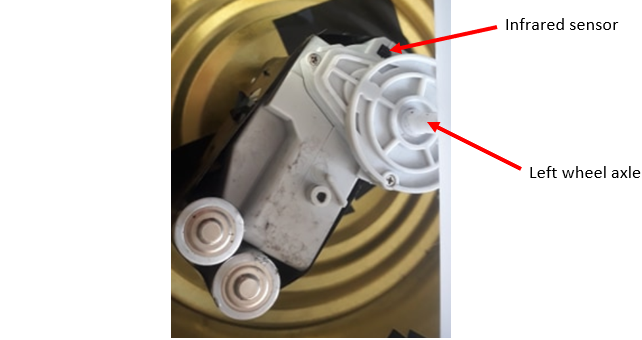
The driving part comes from an extremely basic remote-controlled car found in a toy store. The car consisted of two free front wheels and two rear-wheel drives, each connected to an engine. An infrared remote control was simply two single-axis joysticks that allow each rear wheel to move forward or backward independently.


Finally, for the rover to function through inertia or imbalance, a mass supplement was required that was provided by used batteries that had not yet been selectively sorted
Timeline of essays
It would be too long to detail here each test, and the countless minor modifications that the craft has experienced. However, one should keep track of major architectural steps and modifications. Rome0 went through 4 designs named Romé0.1 in Romé0.4. In order to reuse the elements, each model has been disassembled to make the next model, so there are no images apart from those taken at the moment.
Romé0.1
The idea was to use only the inertia of the wheels to create a hull reaction and thus a rotation. In theory, this concept should work if the centre of gravity was perfectly in the center of the cylinder, which proved impossible in practice. The craft had a stability point to which it returned each time. It can therefore advance only in stages equal to the perimeter of the hull.
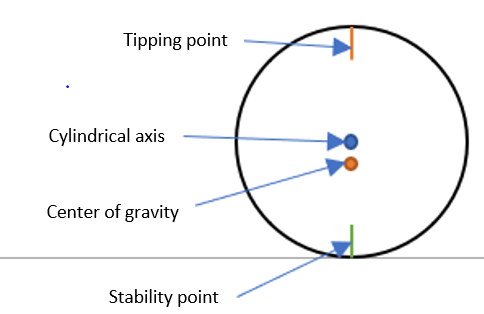

To increase wheel inertia, the tires were replaced by symmetrically arranged batteries. But this inertia was not enough to pass the tipping point in one shot
engine. So we had to go back and forth several times. Since it is impossible to define how far the machine will roll, it is difficult to know which side the tipping point will pass. So he could move forward or backward, but during the trials he often went in the unintethed direction. Moreover, even when the wheels were turned in opposite directions, the machine did not change direction.
Romé0.2
Faced with the impossibility of turning and the difficulty in moving the machine forward, the idea was to place the masses on the wheels in a asymmetrical way in order to increase the weight and be able to control the position of the center of gravity.
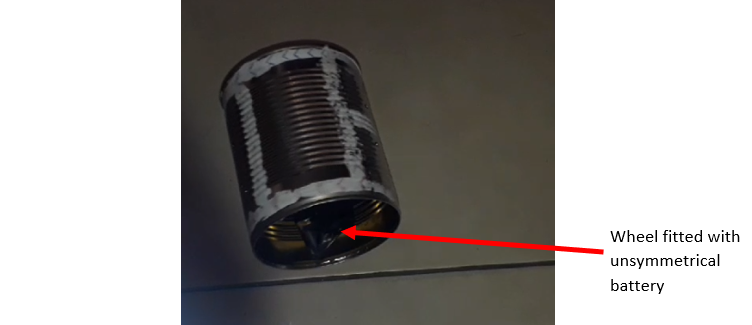
This flap causes a jumping effect that makes it very easy to change direction. Each wheel independently is sufficient for this change of direction. However, both wheels were unable to controllablely alter the centre of gravity of the aircraft, and thus modify the stability point. In practice Romé0.2 was unable to move forward or backward effectively.
Romé0.3
As explained above, Romé0.2 has proven that a single wheel with off-center let is sufficient for the change of direction. The second wheel can therefore be dedicated to moving the centre of gravity. The simplest way to do this is to directly attach the axis from the wheel to the hull in order to benefit from the mass of the engine block.
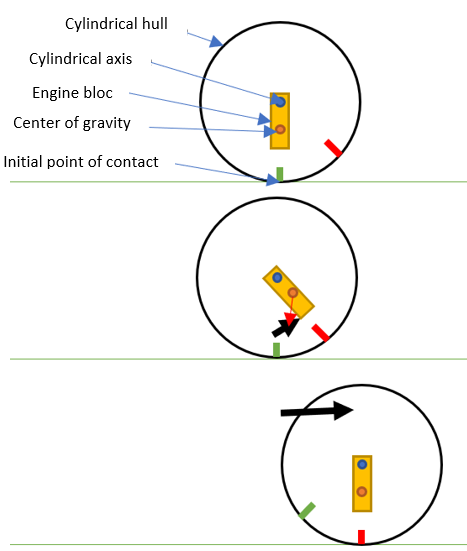
Romé0.3 was progressing relatively well despite the fact that the engine block often touched the walls of the hull that was too small. In addition, the assembly system between the engine and the hull was simply targeted. In reverse he unscreted and disassembled. In terms of the change of direction, the axis of the wheel with dissymmetrical mass swung because of the impact of the engine block against the hull and the lean edge attached to it struck the ground. The tests of Romé0.3 were not filmed.
Romé0.4
The principle does not change compared to Romé0.3, only the design changes. The most visible change is the use of a larger hull in which the engine block can move without touching the walls. The space is even enough to add the let at its end and thus increased the displacement of the center of gravity. The engine-hull link was reinforced with one ankle to prevent unscrement and the support of the lean wheel is reinforced. Finally, after the first unprotected tests, a layer of paper towels was added to reduce noise and avoid slippage on tile.

So the machine moves forward and backwards correctly. The change of direction is effective but lacks precision. The steering is rather intuitive given the speed at which people learn to control it even without instructions. On flat ground, it is possible to reach a specific point, even if it is sometimes necessary to repeat it several times. However, the craft has difficulty climbing a slope or obstacle without momentum but is able to straighten itself if it flips to the side.
Conclusion
The center-of-gravity displacement principle is effective at moving forward with a cylindrical hull, and should be retained for testing of the next model. Although effective, the system of change of direction thanks to a dissy metered lest is not accurate enough and causes violent impacts. With a spherical hull (thus a punctual contact), it will be necessary to consider a softer change of direction system.