Romé0 est le surnom du premier modèle d’essai du projet ROMEO.
Objectifs
Pour rappel, le but de ROMEO est de faire un engin mobile entièrement fermé, sans aucun orifice ou roulement venant affecter l’intégrité de la coque. De ce fait, l’utilisation classique de roue est impossible, c’est tout l’engin qui doit se mouvoir d’un seul bloc.
Le but de ce premier modèle était de vérifier la faisabilité. Vu qu’il était prévu à l’avance qu’il y aurait d’innombrables itérations, le matériel devait être minimaliste et les adaptations les moins invasives possibles afin que les composants puissent être utilisés pour l’itération suivante. L’objectif était d’avoir un engin capable d’avancer, reculer et tourner, même de façon imprécise.
Comparé au design initial du projet ROMEO qui était composé de deux éléments sphériques joints, Rome0 devait dès le début être composé que d’un élément afin de limiter les composants nécessaires. De plus, à la suite de difficultés pour se procurer une coque sphérique de bonne dimension, les essais ont dû être effectués avec une coque cylindrique. Cette différence est possible car le model d’essai ne sera pas soumis à un différentiel de pression et un besoin de minimiser la surface d’échange thermique comme un rover vénusien. Ce choix implique aussi une difficulté supplémentaire pour faire tourner l’engin car la surface de frottement est linéaire et non ponctuelle.
Éléments
Les éléments principaux étaient identifiés dès le début.
Une coque cylindrique qui sert de roue et entoure le rover. Les premiers essais ont été effectués avec un cylindre en plastique (une bouteille de soda). Elle s’affaissait sous le poids du rover créant un polygone de sustentation incompatible avec le mouvement. Aucun essai avec cette première coque n’a été filmé. L’adoption d’une coque métallique plus rigide (une boite de couscous en conserve) a permis d’obtenir des résultats satisfaisants pour Romé0.1 et 0.2 (voir chronologie ci-dessous). Mais son diamètre de 10cm, étant trop faible, engendrait des problèmes (décrits ci-dessous à l’étape Rome0.3) et dû être remplacée par une boite de 15cm (une boite de cuisse de canard confit) pour Rome0.4.
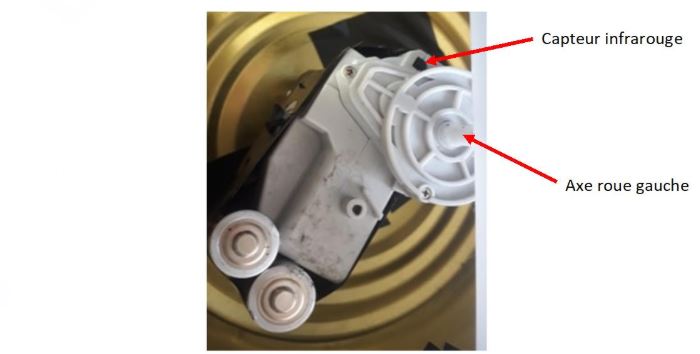
La partie motrice provient d’une voiture télécommandée extrêmement basique trouvable dans un magasin de jouets. La voiture était constituée de deux roues avant libres et deux roues arrière motrices reliées chacune à un moteur. Une télécommande infrarouge constituait de simplement deux joystick mono-axe permet de faire avancer ou reculer indépendamment chaque roue arrière.


Pour finir, pour que le rover fonctionne grâce à l’inertie ou au déséquilibre, il fallait un supplément de masse qui a été fournie par des piles usagées qui n’avaient pas encore été jetées au tri sélectif
Chronologie des essais
Il serait trop long de détailler ici chaque essai, et les innombrables modifications mineures qu’a connus l’engin. Cependant, il faudrait garder une trace des grandes étapes et modifications d’architecture majeures. Rome0 est passé par 4 designs nommés Romé0.1 à Romé0.4. Afin de réutiliser les éléments, chaque modèle a été démonté pour faire le model suivant, il n’y a donc pas d’images en dehors de celles prises sur le moment.
Romé0.1
L’idée était d’utiliser uniquement l’inertie des roues pour créer une réaction de la coque et donc une rotation. En théorie, ce concept devrait fonctionner si le centre de gravité était parfaitement au centre du cylindre ce qui s’est avéré impossible en pratique. L’engin possédait un point de stabilité auquel il revenait à chaque fois. Il ne peut donc avancer que par étape égale au périmètre de la coque.
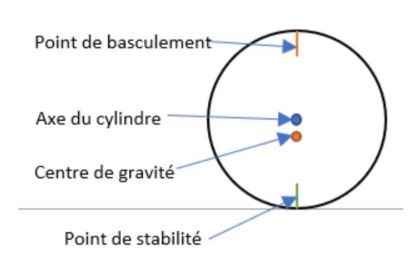

Pour augmenter l’inertie des roues, les pneus ont été remplacés par des piles disposées de façon symétrique. Mais cette inertie n’était pas suffisante pour passer le point de basculement en un coup de moteur. Il fallait donc faire plusieurs allers-retours. Vu qu’il est impossible de définir jusqu’à quel point l’engin va rouler, il est difficile de savoir de quel côté va passer le point de basculement. Il pouvait donc avancer ou reculer, mais pendant les essais il partait souvent dans le sens non voulu. De plus, même en faisant tourner les roues dans des sens opposés, l’engin ne changeait pas de direction.
Romé0.2
Face à l’impossibilité de tourner et la difficulté à le faire avancer l’engin, l’idée a été de placer les masses sur les roues de façon dissymétrique afin d’accroître le balourd et de pouvoir contrôler la position du centre de gravité.
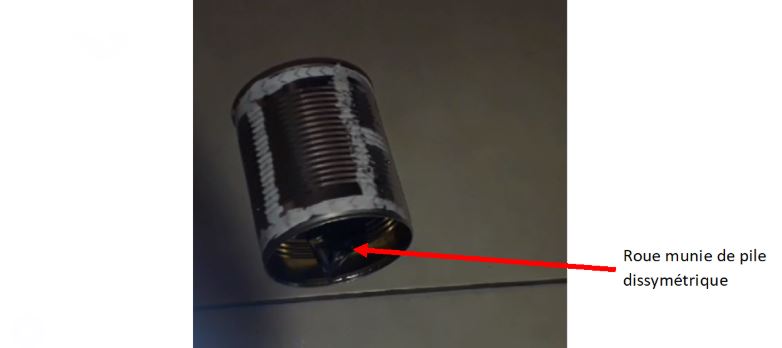
Ce balourd provoque un effet de sautillement qui permet de changer de direction très facilement. Chaque roue indépendamment est suffisante pour ce changement de direction. Cependant, les deux roues se sont avérées incapable de modifier de façon contrôlable le centre de gravité de l’engin, et donc modifier le point de stabilité. En pratique Romé0.2 était incapable d’avancer ou de reculer efficacement.
Romé0.3
Comme expliqué plus haut, Romé0.2 a prouvé qu’une seule roue munie de lest décentré suffit au changement de direction. La deuxième roue peut donc être consacréé au déplacement du centre de gravité. Pour cela le plus simple consiste à fixer directement l’axe de la roue à la coque afin de bénéficier de la masse du bloc moteur.

Romé0.3 avançait relativement bien malgré le fait que le bloc moteur touchait souvent les parois de la coque trop petite. De plus, le système d’assemblage entre le moteur et la coque était simplement visé. En marche arrière il se dévissait et se désassemblait. Pour ce qui est du changement de direction, l’axe de la roue avec masse dissymétrique balançait à cause des impacts du bloc moteur contre la coque et le lest qui y était attaché frappait le sol. Les essais de Romé0.3 n’ont pas été filmés.
Romé0.4
Le principe ne change pas par rapport à Romé0.3, seule la conception change. La modification la plus visible est l’utilisation d’une coque plus grande dans laquelle le bloc moteur peut se déplacer sans toucher les parois. La place est même suffisante pour ajouter du lest à son extrémité et ainsi augmenté le déplacement du centre de gravité. La liaison moteur-coque fut renforcée d’une cheville pour éviter le dévissement et le support de la roue lestée est renforcé. Pour finir, après des premiers essais sans protection, une couche de papier essuie-tout a été ajoutée afin de diminuer le bruit et d’éviter les glissements sur du carrelage.

Ainsi l’engin avance et recule correctement. Le changement de direction est efficace mais manque de précision. Le pilotage est plutôt intuitif au vu de la vitesse à laquelle les personnes apprennent à le contrôler même sans consignes. Sur un terrain plat, il est possible d’atteindre un point précis, même s’il est parfois nécessaire de s’y reprendre à plusieurs reprises. Cependant, l’engin a du mal à monter une pente ou un obstacle sans élan mais est capable de se redresser s’il bascule sur le côté.
Conclusion
Le principe de déplacement de centre de gravité est efficace pour avancer avec une coque cylindrique, et devrait être conservé pour les essais du modèle suivant. Même s’il est efficace, le système de changement de direction grâce à un lest dissymétrique n’est pas assez précis et provoque des impacts violents. Avec une coque sphérique (donc un contact ponctuel), il conviendra d’envisager un système de changement de direction plus doux.