ROtating Mobile for Environmental Observation
Rover d’observation isolé
À l’heure actuelle, toutes les sondes ayant touché la surface étaient fixes. Elles ont fourni des images de leur environnement immédiat mais n’ont pas pu se déplacer pour étudier certaines formations géologiques. De plus, pour éviter que les atterrisseurs basculent, ils se sont posés dans la zone des plaines. Pourtant il serait extrêmement intéressant d’étudier les reliefs sur place pour en étudier la composition et la stratigraphie. Pour cela un rover capable de se redresser et de se déplacer pendant plusieurs jours permettrait de multiplier les observations dans un environnement escarpé.
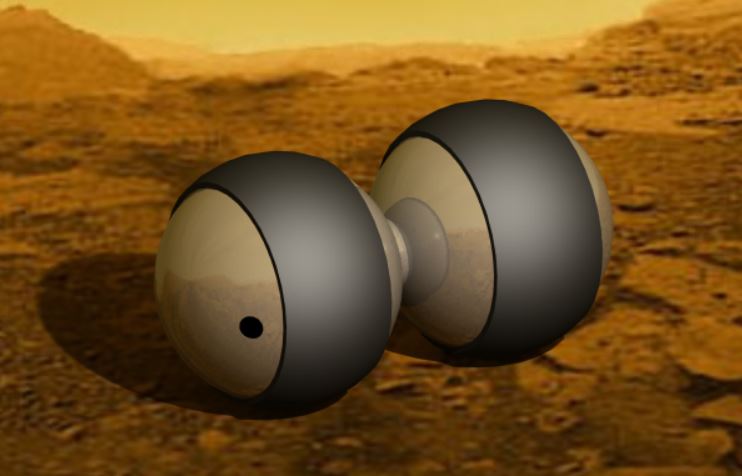
L’objectif est de concevoir un rover pouvant se mouvoir plusieurs jours en surface. Pour rester simple, il faut l’isoler au maximum et pour cela la solution la plus prometteuse est une double enceinte à vide (deux coques concentriques séparées par du vide). Cette solution interdit l’utilisation de passage à travers la coque qui serait de trop gros ponts thermiques. L’instrumentation se limiterait à des caméras et des spectromètres regardant à travers des hublots. L’utilisation de roues est aussi proscrite car un arbre de transmission ou des câbles d’alimentation (le moteur électrique risque de toute façon de surchauffer) nécessiteraient des passes-coques. Le design pour l’instant consiste à créer deux boules indépendantes liées par un roulement à billes. Dans chacune se trouverait un balancier qui pourrait déplacer le centre de gravité de la boule et la faire rouler. De plus, en étant poussé par le vent ou en descendant une pente, le rover se déplacerait et le mouvement de balancier à l’intérieur permettrait de créer de l’électricité.
des premiers essais avec une modèle cylindrique c’est avéré assez efficace

Ci-dessous voici les principaux points à étudier pour développer ce rover :
–Moyen de locomotion : Le but est de créer et de tester le système de pilotage par balancier dans deux boules liées. Il ne nécessiterait que deux boules de plexiglas, moteur, système de contrôle et télécommande d’aéromodélisme. En y ajoutant un repère de verticalité, il serait envisageable de programmer son déplacement ou de lui demander de maintenir automatiquement une position statique face à des perturbations (vents, coups).
–Charge utile scientifique : L’idée est de voir comment reconstituer une image 3D de l’environnement avec des caméras qui tournent avec les boules. Un autre aspect serait de voir la faisabilité d’une analyse spectroscopique au travers d’un hublot assez épais pour survivre à la surface de Vénus.
–Système de refroidissement : Même avec une isolation parfaite le rover va finir par surchauffer rien que par l’énergie dégagée par les équipements internes. Il faut donc étudier comment évacuer ce flux de chaleur dans un environnement aussi infernal que Vénus. À défaut il faut cherche un matériau capable d’absorber cette énergie le plus longtemps possible.